Tactile Module
Records high-precision, distributed tactile interaction data.

PaXini Omnimodal Embodied Intelligence Dataset
OmniSharing DB is a omni-modal embodied dataset covering tactile, visual, audio, text, and joint data, providing comprehensive support for embodied AI models from physical perception to semantic cognition.China’s first government-supported, fully compliant embodied AI cross-border data project, strictly adhering to the Cybersecurity Law, Data Security Law, and PIPL.

Strictly compliant with China’s Cybersecurity Law, Data Security Law, and Personal Information Protection Law (PIPL), with official approval for cross-border data transfer.

PaXini collaborates with leading global cloud service partners to build a “fast lane” for large-scale data delivery.

Establishes a compliant pipeline from collection, processing, and certification to cross-border transfer, enabling global circulation for embodied data.
Comprehensive data diversity for embodied AI development
Records high-precision, distributed tactile interaction data.
Records joint angles from the collection glove and tracks global trajectory data.
Provides synchronized multi-view, high-frame-rate video streams that comprehensively capture the task scenario.
Process multi-view synchronized video streams and annotate corresponding spatial trajectories using estimation algorithms.
Voice data collected before task execution, describing the task.
Structured textual information obtained by converting the collected Voice data.
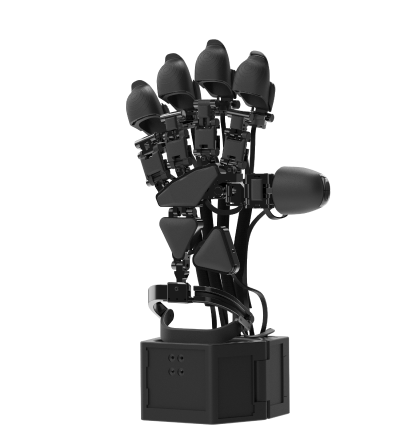
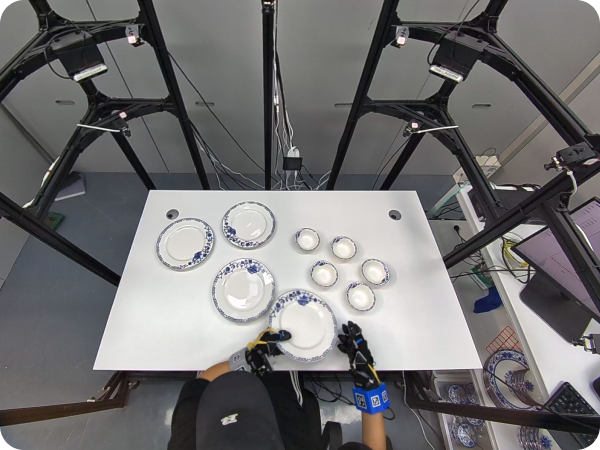
Proprietary multi-modal hand sensing system integrates sensing glove, camera array and IPC to acquire hand kinematics, full-domain tactile data and task videos.
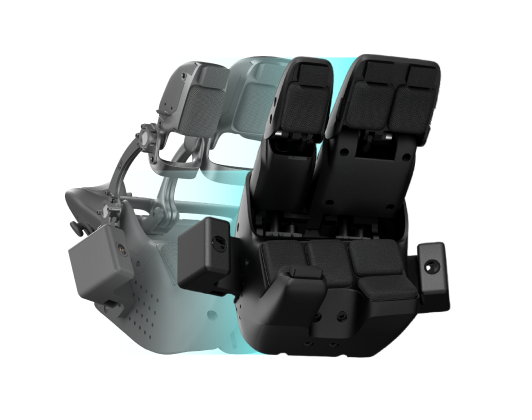
PXCap III combines isomorphic data collection and execution with high-precision tactile and motion capture. It provides reliable, high-quality data for embodied AI in real-world scenarios.
Targeting dexterous manipulation scenarios, human-centric high-precision sampling generates high-fidelity haptic data to close model data loops.

Open collection builds upon In the Wild data collection, relaxes scenario constraints to enrich the model’s environmental awareness, improves long-sequence task planning performance, and evolves iteratively to expand diversified data collection solutions.
Comprehensive data diversity for embodied AI development
Scene Types
15+N
Task Categories
100+
Task Categories
1000+

All Scenes

Office

Home

Healthcare

Medical

Rehabilitation

Logistics

Education

Entertainment

3C Manufacturing

Restaurant

Agriculture

Business

Retail

Disaster Rescue

Automotive

Industrial

Meta Action
Cross-embodiment capabilities and comprehensive data characteristics
Simulation Env
High-Fidelity physical sensing&Sim Platform
Digital Assets
High Fidelity 3D Gasuusian splatting
Multi-Adaptability
High-Accuracy Retargeting&Response
Comparing different data collection approaches for embodied AI
Hierarchical dataset organization across all processing stages
The overall input: raw data after preprocessing and quality inspection
1st output: DF-1 with encoder and tactile data parsed; adds bimanual and object poses; includes both action and observation
The observation layer in DF-2 and DF-2R is the state data in the episode, while action is one frame behind observation. To ensure both arrays have equal length, the last frame in action is repeated.
2nd output: DF-2 retargeted to a dexterous hand model
The observation layer in DF-2 and DF-2R is the state data in the episode, while action is one frame behind observation. To ensure both arrays have equal length, the last frame in action is repeated.
3rd output: converts DF-2R to the LeRobot dataset format; can be used for VLA model training
Comparing different data collection approaches for embodied AI
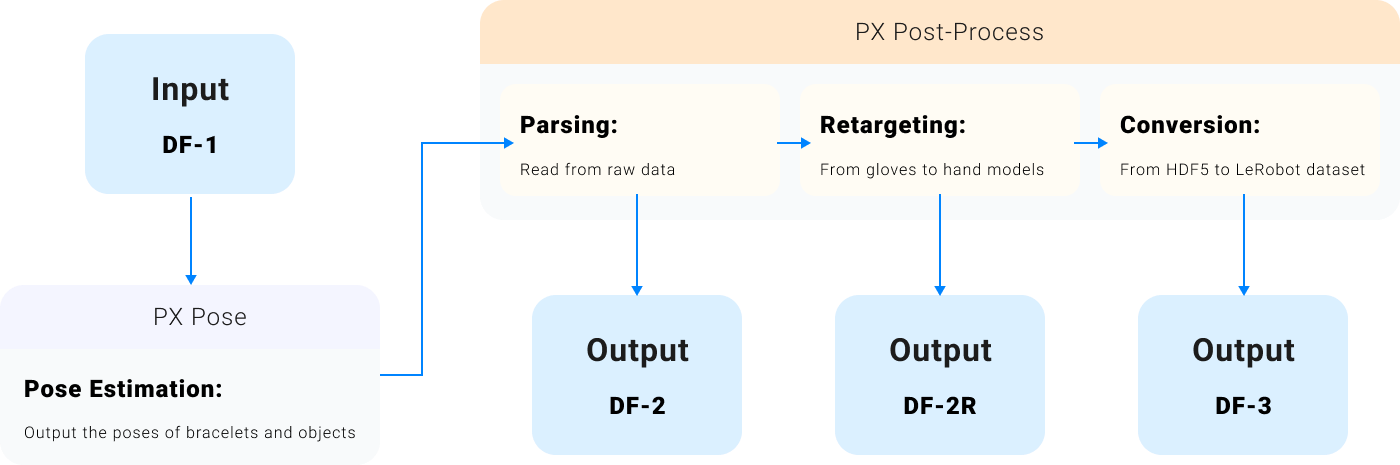
the pose estimation and processing module
DF-1 format parses RGBD camera information and aligns multi camera temporal data to provide input for pose estimation.
Binocular infrared depth estimation, wristband automatically detects pose, and objects need to be manually labeled with masks to estimate pose.
Parses and converts after all raw data is obtained
Processes the raw data output from PX Pose and generates the DF-2 data format.
Retargets DF-2 data to the embodiment and outputs DF-2R.
Processes DF-2R data and exports it in the LeRobot data format.
Cross-embodiment capabilities and comprehensive data characteristics
Cross-embodiment capabilities and comprehensive data characteristics
PaXini · Shenzhen
+86 755 2357 4593
PaXini · Shanghai
+86 21 5456 1536
PaXini · Tianjin
+86 22 8241 1882
mkt@paxini.com China
sales_global@paxini.com Overseas
hr@paxini.com